Sources:AUTOMATICA 45(3) 842-846 ,2009
Authors:Mao, WJ Chu, J
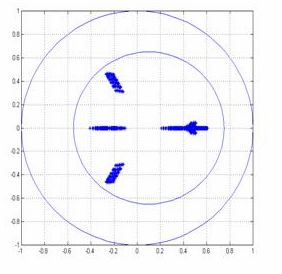
Sufficient conditions for D-stability and D-stabilization of linear discrete time-delay systems with polytopic uncertainties are proposed in this paper. The results are based on parameter-dependent Lyapunov functions obtained from the feasibility of a set of LMIs defined at the vertices of polytopic systems. These conditions guarantee all the poles of a corresponding system in a specified circular region. Finally, an illustrative example shows that the proposed conditions are effective to check the D-stability and to design the D-stabilizing controller for linear discrete time-delay systems.