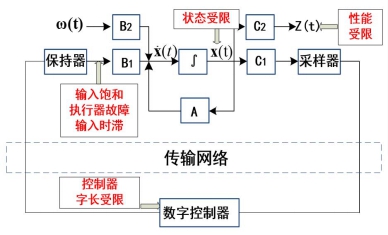
项目负责人控制学院苏宏业教授,获2015年高等学校自然科学一等奖。实际控制系统的输入/输出、状态和动态性能常常因环境、装备、工艺及安全等因素受到限制,控制器在数字化实现过程中还存在精度约束,传统的控制理论和方法往往无法满足实际工程设计和性能需求,因此面向受限系统的鲁棒控制理论与技术研究具有十分重要的理论意义与应用价值。本项目针对系统输入/输出/状态受限、性能约束和控制器精度有限等问题,通过深入、系统地研究,提出了受限复杂控制系统的鲁棒性分析与综合设计理论及方法体系。

项目负责人控制学院苏宏业教授,获2015年高等学校自然科学一等奖。实际控制系统的输入/输出、状态和动态性能常常因环境、装备、工艺及安全等因素受到限制,控制器在数字化实现过程中还存在精度约束,传统的控制理论和方法往往无法满足实际工程设计和性能需求,因此面向受限系统的鲁棒控制理论与技术研究具有十分重要的理论意义与应用价值。本项目针对系统输入/输出/状态受限、性能约束和控制器精度有限等问题,通过深入、系统地研究,提出了受限复杂控制系统的鲁棒性分析与综合设计理论及方法体系。